
随着物联网的快速发展,对复杂环境下多物理量协同感知的需求日益增长。实际应用中,结构往往同时伴随压力、应变、振动等多种机械刺激,仅依赖单一传感机制已难以实现对复杂状态的准确感知。通过融合压阻、压电、电容等多种机制的多模态柔性传感器逐渐成为研究热点。然而,在单一传感器中集成多种传感机制仍面临根本性挑战:由于不同传感机制共享同一电学读出通路,其输出信号容易在公共电路中相互叠加,从而难以实现独立、准确的信号辨识。现有多模态传感系统通常采用引入隔离层的多层堆叠结构,或通过平面空间分离来消除通道间串扰。然而,这类结构策略不仅增加了器件复杂度,还会降低系统集成密度,并可能因机械模量失配引发界面可靠性问题。更重要的是,这些结构框架本质上仍依赖物理隔离实现信号分离,并未真正解决不同传感机制之间的内在耦合问题,其耦合行为的本征机制至今仍缺乏清晰认识。
团队设计了一种基于简单“三明治式”压电结构的多模态传感器,将压阻层直接作为压电单元的一侧电极,利用两者显著的阻抗差异(约 1 kΩ 与 100 MΩ)构建阻抗域解耦机制,实现了两类传感信号在共享电路中的独立输出与近乎无串扰检测,有效解决了传统混合传感系统因复杂结构带来的可靠性问题。其中,压电信号可直接测量应变速率,与压阻单元对应变幅值的检测形成互补,实现了动态–静态应变信息的一体化同步感知。此外,本研究采用可规模化、低成本的超声喷涂工艺,制备了尺寸大于 10 cm × 10 cm 的大面积传感阵列。得益于 PVP 对墨水体系的调控,压阻层实现了 0.001%–45% 的超宽线性应变范围,动态响应频率可达 700 Hz。结合多通道数据采集系统,该平台能够实现微米级形变与应变演变轨迹的全场可视化,并在振动工况下精准识别结构失效,为高保真、全维度结构健康监测提供了新的技术方案(图1)。
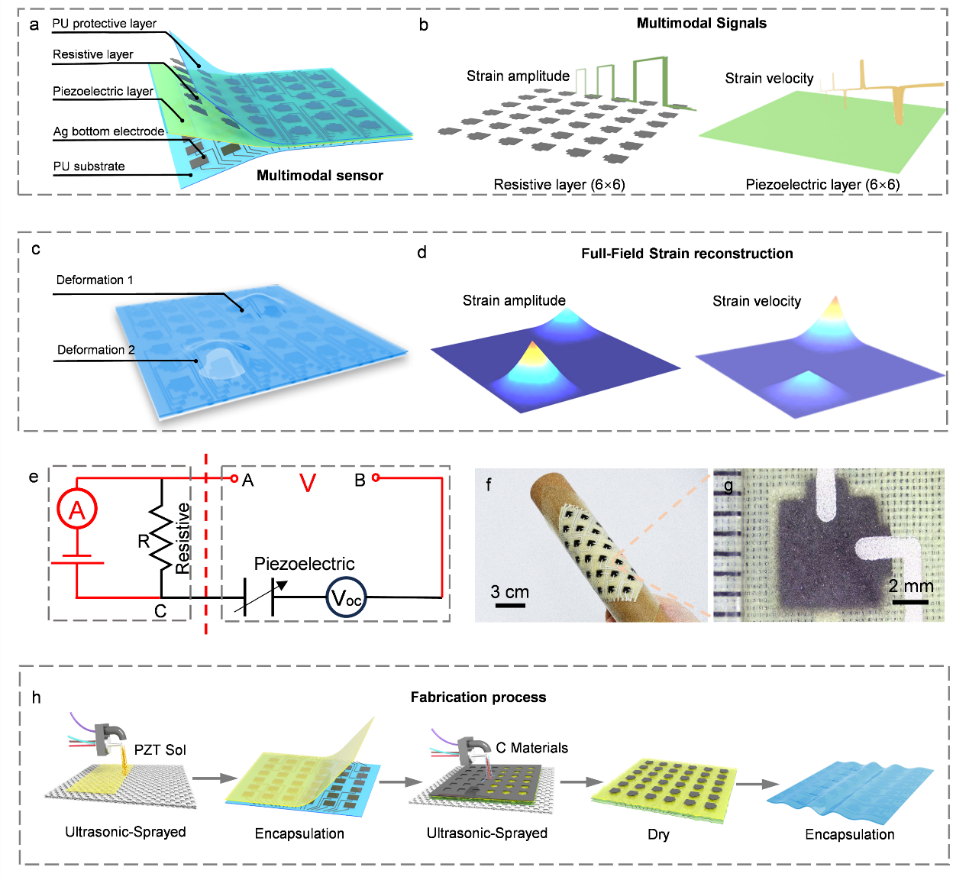
图1. 基于压电–压阻双模态传感的全场动态应变反演系统。(a) 双模态传感阵列结构示意图,其中压阻层同时作为压电层的顶部电极,实现紧凑集成。(b) 信号感知机制示意图,其中压阻传感单元(6 × 6)用于检测应变幅值,压电传感单元(6 × 6)用于形变速度检测。(c) 多模态阵列在凸起形变作用下的变形示意图。(d) 基于多模态传感阵列获得的凸起形变轮廓及形变速度三维重构结果。(e) 阻抗域解耦集成的等效电路图,展示压阻与压电传感单元在共享电学通路中的无串扰协同工作机制。(f) 柔性压电传感阵列实物照片。(g) 单个传感单元的光学显微图像。(h) 基于超声喷涂与封装工艺的传感阵列可扩展制备流程示意图。
研究成果以“Impedance-Domain Decoupled Single-Architecture Multimodal Strain Sensor Array for Full-Field Strain Mapping”为题,正式发表于材料期刊Advanced Materials上。(DOI: //doi.org/10.1002/adma.73557)
随着智能机器人与人机交互技术的快速发展,对复杂接触状态下多维机械信息协同感知的需求日益增长。机器人抓取过程中通常同时伴随法向压力、面内应变及滑移诱导的方向性形变,仅依赖单一物理信息已难以准确表征真实接触状态。因此,能够同时感知应变大小、应变方向与压力信息的多模态触觉传感器,对于实现机器人闭环自适应抓取具有重要意义。然而,现有压电、压阻、电容等触觉传感机制均通过共享形变场实现机械-电学转换,不同机械分量在同一电学通道中易产生耦合。目前,多机械模态的解耦感知通常需要集成多个传感单元,导致器件结构相对复杂。因此,在结构简化的单一器件中实现应变幅值、应变方向与压力信号的独立感知,对于发展高集成度多模态柔性触觉传感器具有重要意义。
基于上述“阻抗域解耦”的传感构架,团队进一步设计了一种可实现应变幅值、应变方向与法向压力独立解耦感知的多模态触觉传感器。具体而言,器件由嵌入聚氨酯(PU)基体中的四片分立锆钛酸铅-玻璃纤维布(PZT-GFF)压电单元构成,其中顶部采用银(Ag)薄膜作为电极,而经超声喷涂构建的超薄微裂纹型碳基压阻层则同时作为四个压电单元的共用底电极,从而在单一器件中实现压电–压阻一体化集成感知。PZT-GFF 引入的局部模量增强能够有效调控器件内部应变分布,使面内应变优先集中于低模量十字区域,从而有效隔绝应变对压电单元的干扰,保障压电通道对法向压力信号的稳定独立响应。与此同时,压阻层中的微裂纹网络会随外加应变方向发生裂纹取向演变,结合四电极信号读出方案,可同步实现对应变幅值与方向的识别。得益于 PZT-GFF 三维互连陶瓷骨架带来的高效应力传递效率,传感器实现了低至 0.125 kPa 的超低压力检测限,并在 0–20% 拉伸范围内表现出高达 0.99 的线性度,能够稳定检测人体脉搏等微弱生理信号。当集成于机器人手中时,该传感器还能够准确区分抓取、滑移与稳定提起等不同操作状态,为机器人闭环自适应抓取控制提供可靠的实时触觉反馈(图2)。
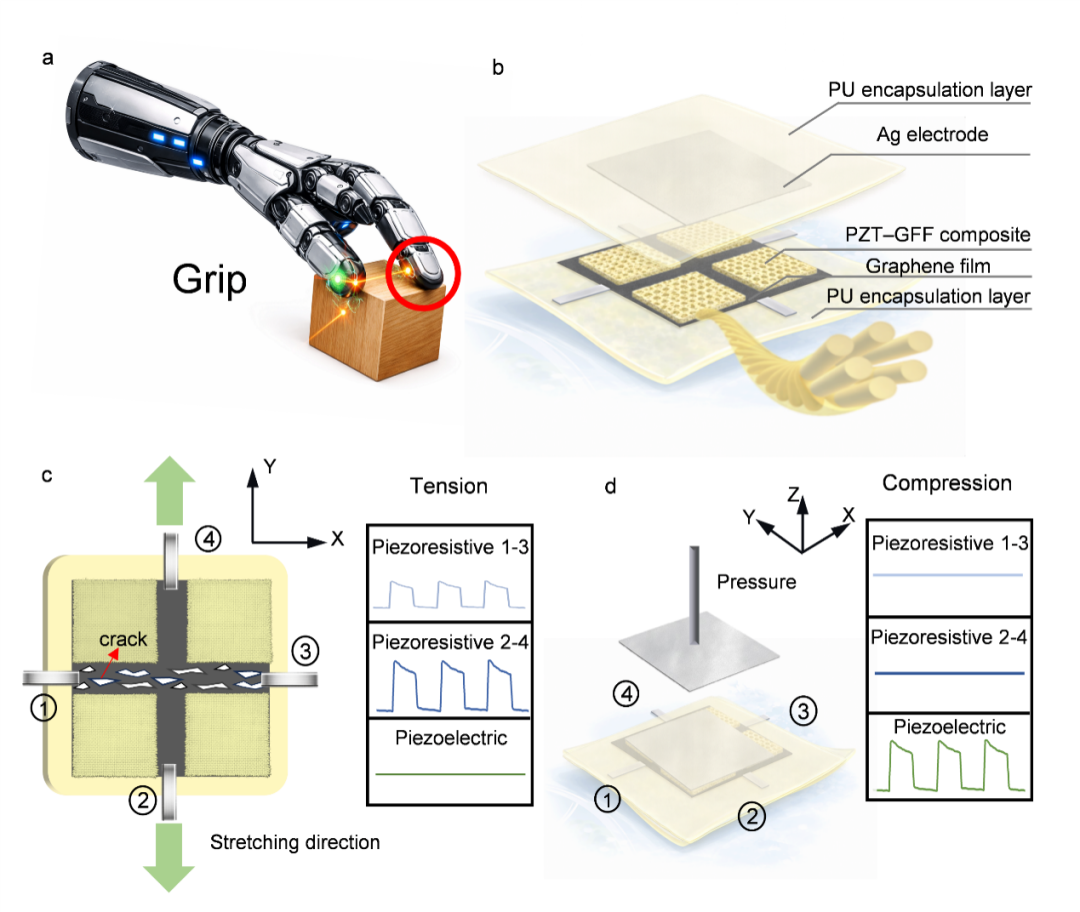
图2 三维力感知的多模态传感器的应用场景与结构设计。(a) 机器人抓取物体的概念示意图,其中通过多模态传感器监测夹持力与滑移状态,实现对抓取力的调控。(b) 多模态传感器的逐层结构示意图。(c) 多模态传感器在拉伸载荷作用下去除顶部电极后的俯视结构示意图(左),以及沿 y 方向拉伸时压电与压阻传感单元输出信号示意图(右)。(d) 多模态传感器在法向压力作用下的结构示意图(左),以及法向压力作用下压电与压阻传感单元输出信号示意图(右)。
研究成果以“Single-architecture flexible tactile sensor for decoupling pressure and vector strain in robotic grasping” 为题,正式发表于材料期刊Chemical Engineering Journal上。(DOI: //doi.org/10.1016/j.cej.2026.177365)
两项研究工作的第一作者为91茄子 郭益平教授指导的2021级直博生殷淏同学,殷淏同学在攻读博士期间,已在Advanced Materials、Advanced Functional Materials,Nano-Micro Letters 等国际知名期刊以第一作者身份发表研究论文6篇,SCI影响因子总和达到118.2。该研究得到了国家重点研发计划项目(No. 2022YFA1205300、2022YFA1205304)以及国家自然科学基金项目(No. 62474107、No. 62301314、No. 52321002)的资助。

-91茄子 91茄子 -
文稿编辑/郭益平课题组
图文编辑/冯家毓
责任编辑/李逸舟、邵士博